Merhaba dostlar, bugün sizlerle üzerinde çalıştığım projede karşılaştığım bir sorundan bahsedeceğim. Proje hakkında maalesef detay vermem mümkün değil ancak üzerinde çalıştığım çözüm yönteminin pek çok örneği olduğu için bende çok kapsamlı olmasa da Türkçe bir kaynak oluşturmak adına bu yazıyı hazırladım.
Üzerinde çalıştığım konu solenoid valflerdeki çapa hareketinin algılanması. Solenoid valf nedir diye bilmeyen arkadaşlar varsa öncelikle kısaca solenoid nedir ve ne amaçla kullanılır sorularına çok kısa cevap vereyim.
Elektrik enerjisi ile çalışan su, hava, buhar, gaz gibi çeşitli akışkan maddelerin geçişlerini kontrol etmek amacıyla kullanılan elektromanyetik sisteme, “selenoid valf” adı verilir. Kullanım alanlarına göre yakıt selenoid valfi, buhar selenoid valfi veya genel selenoid valf olarak çeşitleri bulunmaktadır. Dostlar bu tanım aslında yeterince açıklayıcı ancak solenoidler yazılan bu tekdüze tanımlar dışında, içerinde bulunan çapaların hareketi sayesinde mekanik parçaların birbirine tutunmasını ya da bırakmasını da sağlayabilmektedirler. Açık konuşmak gerekirse lisans öğrenimim sırasında solenoidler hakkında pek bilgiye sahip değildim. Son bir kaç aydır üzerinde çalıştığım proje sayesinde bu elektromekanik bileşenler hakkında araştırmalar yapmaya ve öğrenmeye başladım. Ancak maalesef ki bu konuda Türkçe bir kaynak bulmak pek mümkün değil. Var olan bilgiler de çok derme çatma bilgiler.
Paylaşımımda elimden geldiğince sizlere solenoidler hakkında öğrendiğim bilgilerin en azından bir kısmını paylaşmaya çalışacağım. Hem benim için bir konu tekrarı olmasını hem de sizler için temel seviyede de olsa solenoid valfler hakkında Türkçe bir kaynak olmasını istiyorum. Son olarak bu paylaşım içerisinde kullanılan tüm bilgilerin yer aldığı dokümanların tam listesini yazı sonundaki kaynaklar bölümünde bulabilirisiniz. O zaman başlayalım. 🙂
- Giriş
Elektromekanik solenoidler; valflerde, rölelerde ve kontaktörlerde kullanılmaktadır. Solenoid bobinler, 8 ila 20 W arasında değişen güç tüketimi ile 12V ile 24V DC ve 110V ile 230V AC sistemlerde çalışacak şekilde üretilmiştir [7]. Elektromekanik solenoidler, armatür veya piston adı verilen hareketli bir çelik veya demir çekirdek etrafına sarılmış elektromanyetik olarak endüktif bir bobinden oluşur [9]. Solenoid bobinler, pistonu solenoidin içine çekmek için yalnızca çalıştırma sırasında “çekiş akımı” adı verilen daha fazla akıma ihtiyaç duyar. Bununla birlikte, solenoidler çalıştırıldığında, solenoid bobini, pistonu aynı konumda tutmak için “tutma akımı” olarak adlandırılan nominal akımının yaklaşık %30’una karışık gelen bir akım değerine ihtiyaç duyarlar[7]–[9]. Nominal akımla çalışan solenoid bobinlerde, yüksek güç kaybı nedeniyle bobindeki sıcaklık sürekli olarak yükseltir. Piston hareketi algılandığında, solenoiddeki güç kaybını en aza indirmek için sabit durum akımı “tutma akımı” değerine düşürülebilir. Valf, röle veya kontaktörlerin düzgün çalışmasını sağlamak için piston hareketinin tespiti gereklidir.
Solenoidlerde piston hareketini tespit etmek için literatürde farklı yöntemler ve algoritmalar mevcuttur. Hall sensörlerinin kullanımı [3], [4]’te açıklanmıştır. Ancak Hall sensörleri, pistonun hatalı veya yavaş hareketini tespit edemeyebilir. Bazı algoritmalar, solenoidlerin doğru çalışmasını saptamak için solenoidin uyarma akımı profilini kullanır [5], [6]. Ancak mevcut akım profili, solenoidlerin çalışma sıcaklığına bağlıdır. Bu yöntemler, sıcaklık değişimi sırasında solenoidlerin hatalı çalışmasını tespit etmede başarısız olabilir.
Bu makale, sıcaklık değişimlerinden etkilenmeyen solenoiddeki pistonun hareketini algılamak için bir yöntem önermektedir. Yöntem, piston hareketini algılamak için “ters EMK” hareketinden dolayı solenoidin mevcut profilini kullanır. Bu yazıda solenoidlerin modellenmesi ve karakterizasyonu Bölüm 2’de açıklanmıştır. Sıcaklık değişiminin solenoid özellikleri üzerindeki etkisi değerlendirilir. Farklı piston hareketi algılama yöntemleri bölüm 3’te ayrıntılı olarak açıklanmıştır. Bölüm 3 önerilen yöntem ve önerilen yöntemin farklı sıcaklıklarda performansını gösteren deney sonuçlarını da kapsanmaktadır.
2. Solenoid Bobinlerin Modellenmesi ve Karakterizasyonu
Lineer solenoidler, elektrik enerjisini bir elektrik veya pnömatik veya hidrolik sistemi kontrol etmek için kullanılan doğrusal bir mekanik harekete dönüştüren elektromekanik cihazlardır. Şekil 1, bir elektromanyetik solenoidin kesit görünüşünü göstermektedir. Solenoid, hareketli bir armatür veya piston etrafına sarılmış elektromanyetik olarak endüktif bir bobinden oluşur. Bobin, bobinin endüktansını değiştirerek pistonun merkezine girip çıkabileceği şekilde şekillendirilmiştir [9]. Piston, örneğin bir valfin açılması ve kapanması gibi kontrol mekanizmasını harekete geçirmek için ihtiyaç duyulan mekanik kuvveti sağlar.
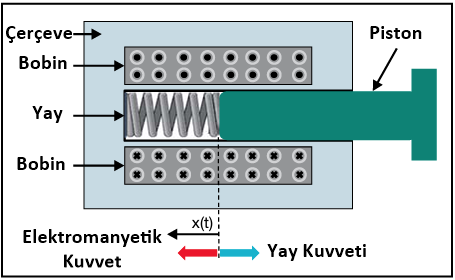
Şekil 1: Elektromanyetik bir solenoidin kesit görünümü
Solenoid, solenoidin elektrik terminallerine bir uyarma voltajı uygulanarak çalıştırılır. Bu voltaj, solenoid sargısında akım oluşturur. Bu akım, manyetik bir devre oluşturan solenoidin muhafazası, pistonu ve hava boşlukları boyunca dolaşan bir manyetik akı üretir. Ana hava boşluğundan geçen manyetik alan, pistonu muhafazanın içine çekmek amacıyla çekici bir kuvvet uygular. Genel olarak tipik bir solenoid, bir elektromanyetik sistem ve bir mekanik sistemden oluşur. Elektromanyetik sistem, uygulanan voltajı mıknatıslanma akımına dönüştürür ve bu da bir elektromanyetik kuvvet üretir. Mekanik sistem, elektromanyetik kuvvet nedeniyle doğrusal hareket üreten piston ve geri dönüş yayından oluşur.
2.A. Solenoidlerin Matematiksel Modellenmesi
Bir solenoidin basitleştirilmiş elektrik denklemi (1)’deki gibi yazılabilir.

V uygulanan voltaj olduğunda, R bobin direncidir ve ψ(fi) akı bağıntısıdır. Denklemin ilk terimi direnç düşüşüne atıfta bulunur ve ikinci terim endüklenen voltajdır [1], [2]. Bobinin endüktansı, solenoidin manyetik relüktansı piston konumuna bağlı olduğundan, pistonun (x(t)) konumuna bağlıdır. Bu nedenle bobindeki akı bağıntısı, bobindeki akıma ve pistonun konumuna bağlıdır. Denklem (1), denklem (2)’yi elde edilecek şekilde genişletilebilir.

Denklem (2)’de ψ=Li eşitliği yazılırsa,

Denklem (2) ve (3)’teki üçüncü terim, piston hareketi ile relüktans değişiklikleri nedeniyle indüklenen bir voltaj olan hareketli ters EMK’yi (elektromotor kuvveti) ifade eder [1], [2]. Piston üzerindeki elektromanyetik kuvvet, solenoidin çalıştığı hava boşluğunda ve çekirdeğinde biriken enerjinin gradyanıdır. Geliştirilen elektromanyetik kuvvet, solenoid akımına ve endüktans gradyanına bağlıdır [2].

Solenoid aktüatörün mekanik modeli, geliştirilen elektromanyetik kuvvet, geri dönüş yayı tarafından uygulanan kuvvet, sönümleme, daha doğru bir model için diğer kuvvetler (ör: akışkanın vanadan geçen basıncı) ve yükün solenoid üzerine uyguladığı kuvvetten oluşan hareket denklemi ile ifade edilebilir.
2.B. Solenoid Bobinin Özellikleri
Solenoid, solenoid bobine bir uyarma voltajı ile enerji verilerek çalıştırılır. Şekil 2, uyarma sırasında solenoidin manyetik akı dağılımını gösterir ve Şekil 3, bir solenoidin tipik uyarma akımı özelliklerini gösterir. Solenoide enerji verilir verilmez, akım artar, elektromanyetik kuvvetin pistonu hareket ettirecek kadar güçlü hale gelene kadar artmasına neden olur ve buna karşılık gelen manyetik akının dağılımı Şekil 2(a)’da gösterilmektedir.
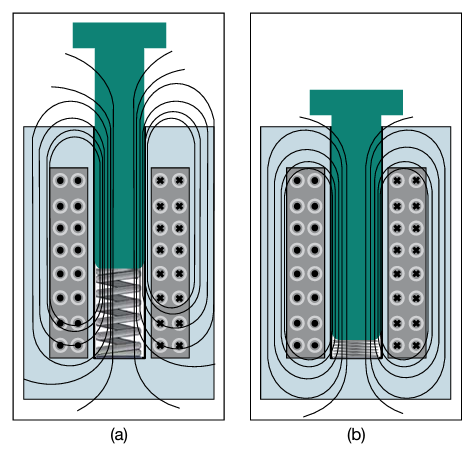
Şekil 2(a): Solenoide enerji verilir ve elektromanyetik kuvvet, pistonu hareket ettirecek kadar güçlüdür. (b) Piston tamamen hareket etti
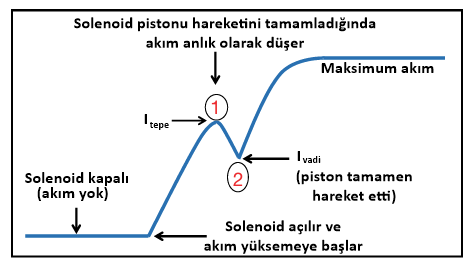
Şekil 3: Bir solenoidin uyarma akımı özellikleri
Şekil 3’te, birinci noktada piston hareket etmeye başlar ve buna karşılık gelen Itepe akımı solenoid akımı olarak adlandırılır. Piston hareketi, daha önce açıklandığı gibi solenoid bobinde ters EMFK’yı indükler ve bu, solenoid akımında kısa bir azalmaya neden olur. İkinci noktada, piston tamamen hareket eder ve akım Ivadi ‘ye düşer. Solenoiddeki karşılık gelen akı dağılımı Şekil 2(b)’de gösterilmektedir. Pistonun tam hareketinden sonra solenoid akımı, bobin DC direnci ile sınırlanan maksimum seviyesine ulaşana kadar yükselmeye devam eder.
2.C. Solenoid akım özellikleri üzerinde sıcaklığın etkisi
Solenoid üzerindeki dış yük, çalışma sıcaklığı, yay gerilimi, sönümleme, piston hareket yolundaki sürtünme, solenoid montaj yönü vb. gibi solenoid bobinin uyarma özelliklerini etkileyen farklı faktörler vardır. Sıcaklığın solenoid üzerindeki etkisini incelemek için, farklı sıcaklıklarda tipik bir solenoid karakterize edilir. Solenoid akımı, solenoid bobine seri bağlanmış 1 Ω algılama direnci kullanılarak ölçülür. Şekil 4 ve Şekil 5, –30°C ve +45°C’lik iki aşırı sıcaklıktaki solenoid akımını göstermektedir. Solenoid bobinin direncindeki azalma nedeniyle sıcaklık azaldıkça eğriler yukarı kayar. Bununla birlikte akımları arasındaki fark, sıcaklık dağılımı boyunca sabit kalır. Şekil 6, solenoid tarafından farklı sıcaklıklarda çekilen akımları göstermektedir.
Şekil 4: -30°C sıcaklıkta Solenoidin akım karakteristiği
Şekil 5: +45°C sıcaklıkta Solenoidin akım karakteristiği
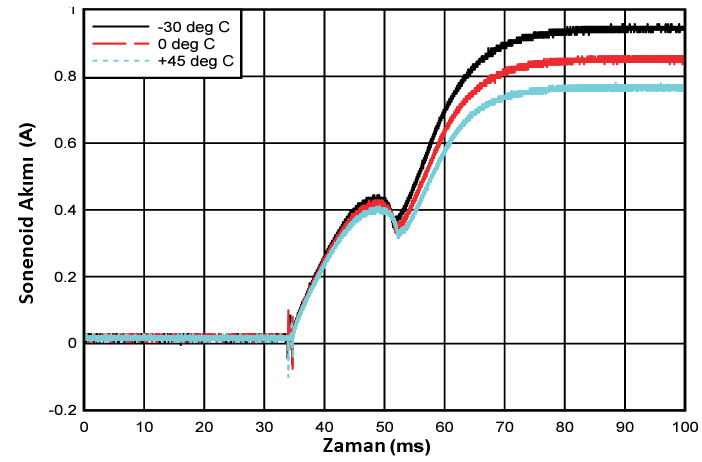
Şekil 6: Farklı sıcaklıklarda solenoid akım eğrileri
3. Solenoidlerde Piston Hareketi Algılama
Solenoidin konumunu tespit etmek için literatürde farklı yöntemler mevcuttur. Bu yöntem ve algoritmalardan bazıları aşağıdaki bölümlerde açıklanmıştır.
3.A. Hall Sensörü Kullanılarak Piston Hareketi Algılama
Hall sensörleri, solenoiddeki piston konumunu algılamak için yaygın olarak kullanılır. Hall sensörlerinin kullanımı, piston hareketinin akı bağlantısında değişikliğe neden olduğu ilkesine dayanmaktadır [3], [4]. Solenoid bobin tarafından üretilen manyetik akı yoğunluğunu tespit etmek için algılama cihazı olarak bir Hall sensörü kullanılır ve bu nedenle bir Hall sensörünün çıkışı, pistonun konumu ile orantılıdır. Hall sensörü, akı bağlantısındaki değişimi tespit etmek için uygun bir yere monte edilmelidir. Piston konumunu algılamak için Hall sensörü kullanımının bazı dezavantajlar vardır. Bu sensörlerin mekanik montajı karmaşıktır ve performansları eskimeden etkilenir. Arızalı bir solenoidde, sürtünme, paslanma vb. etkenler nedeniyle piston hareketi yavaş olabilir. Ancak Hall sensörü, her durumda piston hareketinin sonunda bir çıkış sinyal verecektir. Dolayısıyla bir Hall sensörü kullanmak, pistonun yavaş veya hatalı hareket ettiğini tespit edemez.
3.B. Solenoidin Uyarma Akımı Profilini Kullanarak Piston Hareketi Algılama
Literatürde, bir solenoidin uygun hareketini saptamak için solenoidin uyarma akımı profilini kullanan çeşitli çözümler önerilmiştir.
[5]’te açıklanan solenoid piston konumu algılama algoritması, solenoid karakterizasyon verilerini kullanır. Pistonun hareketini başlatmak için gerekli akım, piston hareketinin sonundaki akım ve solenoid karakterizasyonu sırasına karşılık gelen süre önceden belirlenmiş değerler olarak kontrolörde saklanır. Normal çalışma sırasında ölçülen süre ve aktüatör akım değerleri, önceden belirlenmiş değerlerle karşılaştırılır. Ölçülen değerler ve önceden belirlenmiş değerler arasındaki fark, solenoidin düzgün çalışmasına karar vermek için kullanılır. Solenoidin uyarma akımı profilinin eğimini ölçen algoritmalar vardır[6]. Solenoidin endüktansı, piston konumuna bağlıdır. Bu nedenle, piston hareketinden önceki ve sonraki akım eğrisinin eğimi farklı olacaktır. [6]’da açıklanan algoritma, üç farklı durumda akım eğrisinin eğimini ölçer ve pistonun konumunu saptamak için karşılaştırır. Bu algoritmalar, sıcaklık değişiminin solenoid özellikleri üzerindeki etkisini ele almaz.
3.C. Pik ve Vadi Akımı İçin Sabit Referans Kullanarak Piston Hareketi Algılama
Bu, solenoid akım profilini kullanan başka bir piston hareketi algılama yöntemidir. Algılama mantığı, tepe ve vadi akımını algılamak için sabit referanslı iki karşılaştırıcı kullanmaktır. Piston, Itepe ve Ivadi akımlarını elde etmek için sabit bir T1 (Şekil 7) sıcaklığında karakterize edilecektir ve bu değerler karşılaştırıcılar için referans eşikler olarak kullanılacaktır. Karşılaştırıcı1’in Itepe referans eşiği vardır ve solenoid akımı Itepe’ye ulaştığında karşılaştırıcı1 çıkışı yüksek olur. Karşılaştırıcı1’in çıkışı yüksek seviyeye ulaştığında Karşılaştırıcı2 etkinleştirilecektir. Karşılaştırıcı2’nin referans akımı Ivadi‘dir ve solenoid akımı Ivadi‘ye düştüğünde karşılaştırıcı2 çıkışı yükselir ve bu sinyal piston hareketi için gösterge sinyali olarak kullanılır. Ancak sıcaklık değiştikçe solenoid eğrileri yukarı veya aşağı kayar, bu da Itepe ve Ivadi‘yi değiştirir ve bu nedenle karşılaştırıcı uygun piston hareketini algılamayabilir. Kısacası, eşiğin önceden sabitlenmesi, sıcaklık değişimi ile pistonun çalışmasının düzgün bir şekilde algılanmamasına neden olabilir.
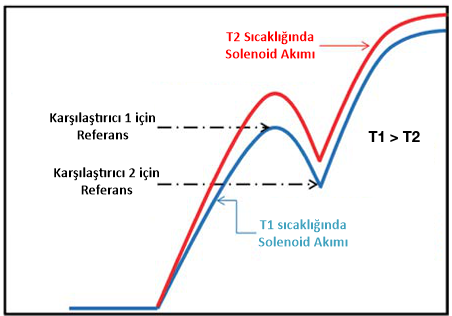
Şekil 7: Tepe ve vadi akımı için sabit referanslar
4. Önerilen Piston Hareketi Algılama Yöntemi
Piston hareketini saptamak için önerilen yöntem, solenoidin uyarma akımı profilini kullanır. Bu yöntem, solenoidin farklı sıcaklıklarda karakterize edilmesiyle elde edilir. Şekil 6, solenoid tarafından farklı sıcaklıklarda çekilen akımları göstermektedir. Sıcaklık arttıkça solenoidin direncindeki azalma nedeniyle eğriler yukarı doğru kayar. Ancak, ters EMK nedeniyle solenoid akımının tepe noktası ve vadisi arasındaki farkın, sıcaklıktan bağımsız olarak sabit kaldığı fark edilebilir. Solenoid akımının bu özelliği, solenoid valfın piston hareketinin algılanmasında kullanılır.
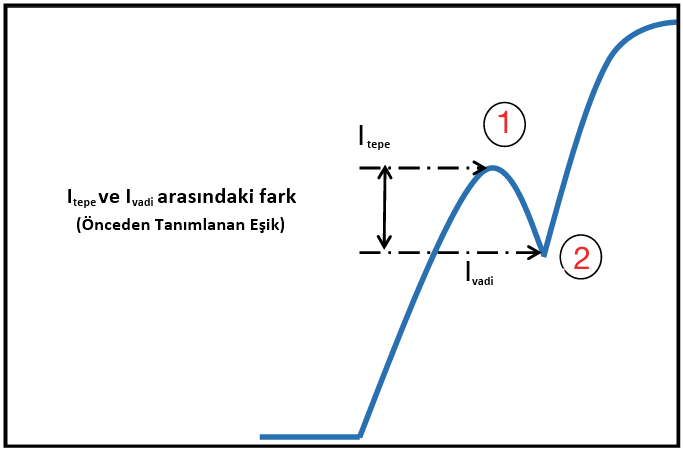
Şekil 8: Itepe ve IVadi arasındaki mutlak farkı kullanan eşik
Itepe ve Ivadi arasındaki mutlak fark (Şekil 8’de gösterildiği gibi) ölçülür ve piston hareketinin tespitindeki eşiği tanımlamak için kullanılır. Eşik, Ivadi ‘nin biraz üzerine ayarlanır ve algılama devresinin sıcaklık değişimlerinden etkilenmemesini sağlamak için Itepe referans olarak seçilir. Şekil 9, tipik bir solenoid sürücü devresini göstermektedir. Solenoid akım kontrolörü, BJT veya MOSFET[8] gibi bir anahtarlama cihazı kullanarak solenoidin tepe ve tutma akımını kontrol etmek için kullanılır.
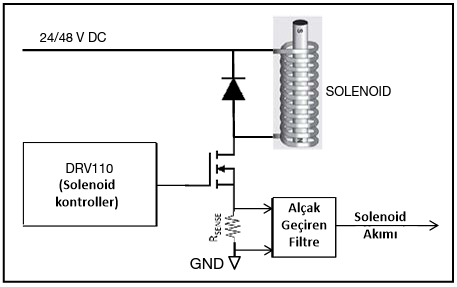
Şekil 9: Akım algılamalı tipik bir solenoid sürücü
Şekil 10, bir amplifikatör, aktif tepe dedektörü, op-amp toplayıcı ve bir karşılaştırıcıdan oluşan piston hareketi algılama devresinin blok şemasını göstermektedir. Algılama mantığı, bir sensör veya kontrolör kullanmak yerine basit op-amp devreleri kullanmaktır.
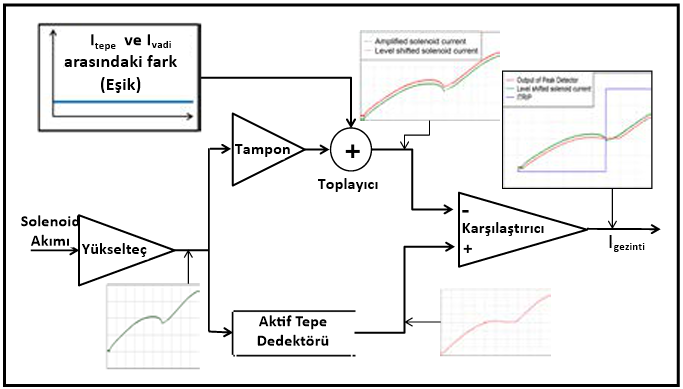
Şekil 10: Önerilen piston hareketi algılama yönteminin blok şeması
Solenoid akımı, bir algılama direnci (şönt direnç) kullanılarak algılanır. Algılama direnci üzerindeki voltaj, op-amp tarafından yükseltilir ve aktif tepe detektörü, tampon (buffer) ve op-amp toplayıcı devresinden oluşan seviye değiştiricinin girişlerine aynı anda uygulanır.
(Dijital bir tampon ( veya bir voltaj tamponu ), bir girişi bir çıkıştan izole etmek için kullanılan bir elektronik devre elemanıdır.)
(Aktif pozitif tepe dedektörü, temel devresi şekil 10-1’de gösterilmektedir. İşlemsel yükselteç ve diyot bir doğrultucu devre gibi çalışmaktadır. Devrenin Vi girişi pozitif iken daha doğrusu pozitif yönde artarken D diyotu iletimdedir. Bu durumda kuvvetlendirici bir izleyici gibi çalışarak C kondansatörünün uçlarında gözüken Vo çıkış geriliminin V gerilimini aynen izlemesini sağlar. Vi gerilimi azalmaya başladığında ise kuvvetlendirici çıkış gerilimi, kondansatör geriliminin seviye olarak altında kalmaya başlar. Sonuç olarak diyot kesime girer ve işlemsel yükselteç devre dışı kalır. Bu durumda C kondansatörünü dolduran etken ortadan kalktığından C kondansatörü, Vo geriliminin daha önceki değerlerinin en büyük olduğu değeri saklı tutmuş olur. Pratikte C kondansatörü kendinden sonra gelen devrenin giriş direnciyle veya başka bir R yük direnciyle yüklü durumda olup yükü, RC zaman sabitiyle boşalmaktadır. Bazı durumlarda çıkış geriliminde böyle bir azalma istendiğinden R direnci özel olarak devreye eklenir. R yük direncinin C elemanını yüklemesi nedeniyle ve geriliminin zamanla azalması istenmiyorsa C ve R elemanları arasına empedans çevirme özelliği olan ve empedans yüklemesi açısından bir izolasyon sağlayan bir izleyici kullanılmalıdır.)
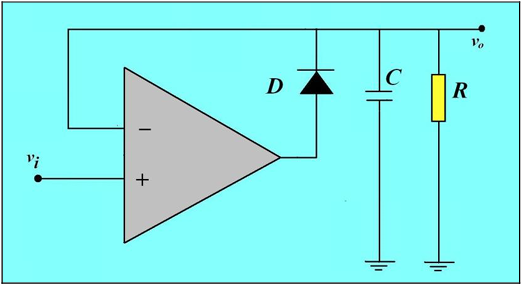
Şekil 10.1: Aktif Tepe Dedektörü Devresi
Aşağıda yer alan Şekil 11, piston konumu algılama devresindeki farklı düğümlerdeki dalga biçimlerini göstermektedir. Pik dedektör çıkışı solenoid akımını, solenoid pistonunun hareket etmeye başladığı nokta 1’e kadar izler. Bu noktadan sonra solenoid akımı, ters EMK nedeniyle azalır ve akım ikinci noktaya düşer. Ancak tepe dedektörünün çıkışı, nokta 1’deki tepe değerine eşit bir değerde kalacaktır ve karşılaştırıcının evirmeyen girişini besleyecektir. Güçlendirilmiş solenoid akımına, önceden tanımlanmış eşik, Itepe ve Ivadi akımları arasındaki mutlak fark eklenerek seviye kaydırılır. Karşılaştırıcının evirici girişi, seviye kaydırmalı solenoid akımı ile beslenir.
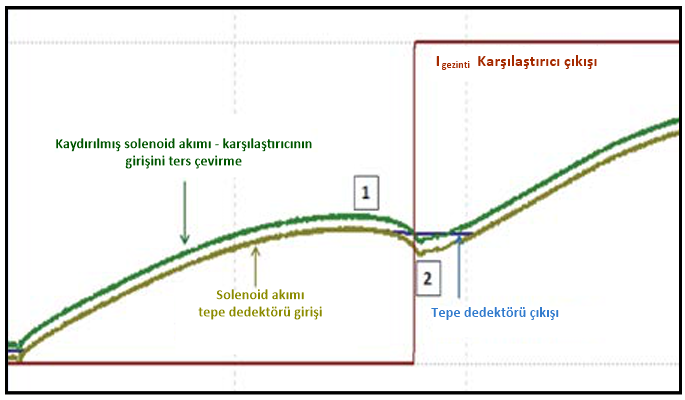
Şekil 11: Önerilen dalgıç hareketi algılama devresindeki farklı düğümlerdeki dalga biçimleri
Karşılaştırıcı Igezinti ‘nin çıkışı yükselir ve seviye kaydırmalı akım tepe dedektör çıkışının altına düştüğünde kilitlenir. Solenoid arızalı olduğunda veya hareket etmediğinde veya yavaş hareket ettiğinde, solenoid akımı, devre parametreleri dikkate alınarak önceden tanımlanmış eşiğin altına düşmek için yeterli büyüklükte bir eğime veya düşüşe sahip olmayacak ve bu nedenle karşılaştırıcı Igezinti ‘in çıkışı her zaman düşük olacaktır. Itepe ve Ivadi akımları (eşik) arasındaki mutlak fark, farklı solenoid türlerine göre değişmektedir. Önerilen devrede eşik, dirençli bir bölücü kullanılarak ayarlanmaktadır. Bu nedenle, farklı solenoid türleri ile, Itepe ve Ivadi akımları arasındaki mutlak farka dayalı olarak, eşiği tanımlamak için dirençli bölücü değerleri ayarlanabilir.
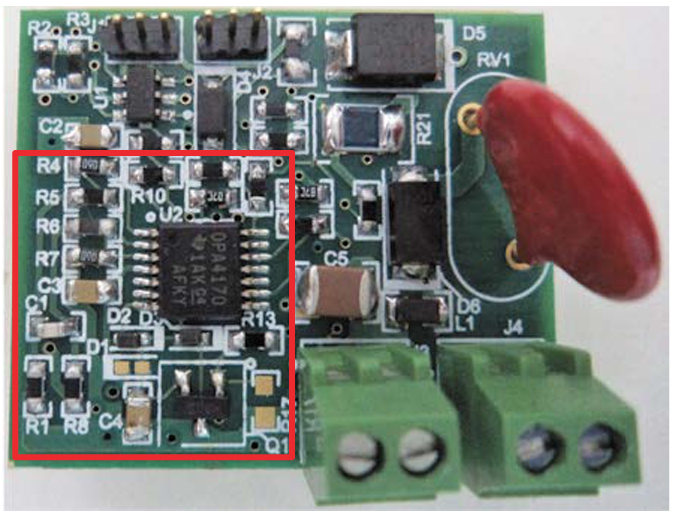
Şekil 12: Piston hareket algılama devresine sahip solenoid sürücü kartı
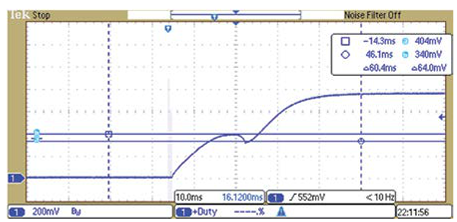
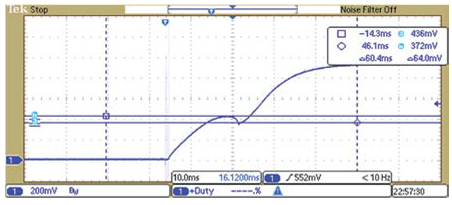
Şekil 12, piston hareket algılama devresine sahip solenoid sürücü kartının görüntüsünü göstermektedir. Şekil 13, piston hareketi algılama devresinin deney test sonuçlarını göstermektedir. Piston tamamen hareket ettiğinde solenoid akımı vadi noktasına düşer ve karşılaştırıcı çıkışı Igezinti akımı yüksekte kilitlenir.
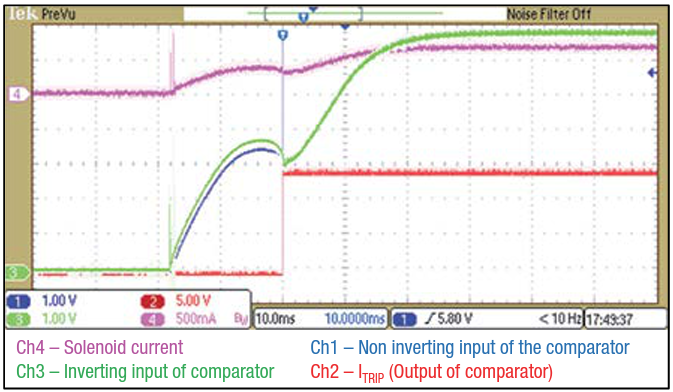
Şekil 13: Önerilen yöntemin deney test sonuçları
Solenoid ve sürücü kartı, termal odanın içinde tutulur ve farklı sıcaklıklarda test edilir. Şekil 14 ve Şekil 15, sırasıyla +55°C ve -30°C ortam sıcaklığında yapılan testin sonuçlarını göstermektedir. Arıza göstergesi çıkış sinyali, piston hareket etmeyene kadar yüksektir ve piston hareketinin sonunda alçalır. Sonuçlar, piston hareketi algılama devresinin farklı sıcaklıklarda piston hareketini doğru şekilde algıladığını doğrular.
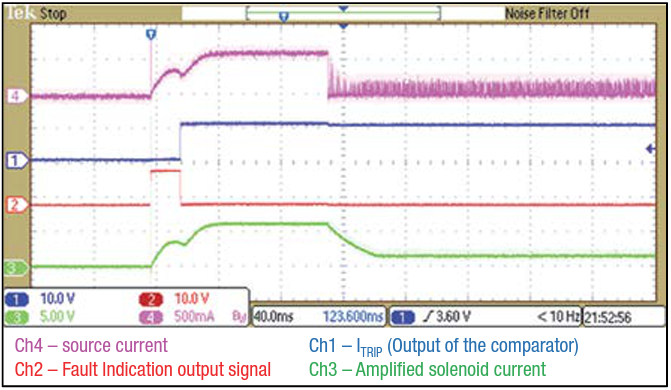
Şekil 14: Önerilen yöntemin +55°C’de deney test sonuçları
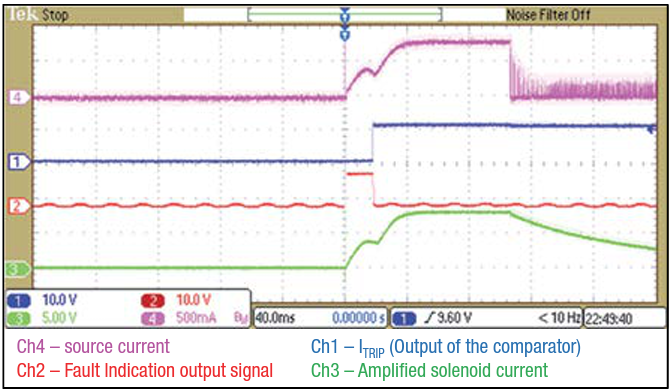
Şekil 15: Önerilen yöntemin –30°C’de deney test sonuçları
5. Sonuç
Bu yazıda, bir solenoiddeki bir pistonun uygun hareketini tespit etmek için bir yöntem önerilmiştir. Önerilen yöntem, solenoid akımını algılayarak bir solenoid içindeki bir pistonun hareketini tespit eder. Yöntem, piston hareketi tarafından üretilen geri EMK nedeniyle, tepe akımı (Itepe ) ve vadi akımı (Ivadi ) arasındaki solenoid uyarma akımı özelliklerindeki belirgin düşüşü kullanır. Solenoid, farklı sıcaklıklarda karakterize edilir ve ters EMK’dan kaynaklanan solenoid akımı düşüşünün sıcaklıktan bağımsız olarak sabit kaldığı gözlemlenir. Bu yazıda önerilen çözüm, solenoid valfın pistonunun hareketini tespit etmede solenoid akımının bu özelliğini kullanır. Itepe ve Ivadi arasındaki mutlak fark ölçülür ve piston hareketinin tespitindeki eşiği tanımlamak için kullanılır. Algılama mantık devresi solenoid akımını algılar ve akım önceden tanımlanmış eşiğin altına düştüğünde, piston hareketinin sonu olarak yorumlanır. Farklı sıcaklıklardaki deney sonuçları önerilen yöntemi doğrulamaktadır. Daha ayrıntılı okuma için lütfen buradaki adresi ziyaret ediniz.
6. Referanslar
[1] I. Dülk ve T. Kovácsházy, “Yük dengelemeli solenoid aktüatörlerde sensörsüz konum tahmini,” Carpathian Control Conference (ICCC), 12th International, 2011, s. 268–273.
[2] I. Dülk ve T. Kovácsházy, “Modelling of a lineer orantılı elektromanyetik aktüatör ve sensörsüz piston konum tahmini olasılıkları,” Instrumentation and Measurement Technology Conference (I2MTC), IEEE International, 2012, s. 89–93.
[3] Daniel E. Zimmermann, “Hall efekt teknolojisine sahip elektronik solenoid kontrol aparatı ve yöntemi,” ABD Patenti US5523684 A, 4 Haziran 1996
[4] Peter Willard Hammond, “Mekanik olarak kilitleme solenoidi için konum sensörü,” ABD Patenti 8319589, 27 Kasım 2012
[5] Stephen C. O’Leyar ve Robert P. Siegel, “Solenoid piston konumu algılama algoritması,” ABD Patenti US6326898 B1, 4 Aralık 2001
[6] Stephen Rober, “Solenoid aktüatör hareket algılama,” ABD Patenti US7432721 B2, 7 Ekim 2008
[7] Texas Instruments, “Planger Fault Detection (TIDU578) ile 24-V DC Solenoid için Akım Kontrollü Sürücü”, Referans Tasarım, Kasım 2014
[8] Texas Instruments, “DRV110 – Entegre besleme düzenlemeli (Rev. A) (SLVSBA8A),” DRV110 veri sayfası, Ocak 2013
[9] Texas Instruments, “Şalter uygulamalarında solenoid bobinleri verimli bir şekilde sürmek (SLYT544),” Analog Applications Journal, Aralık 2013.
Topraklama ve İzolasyon Direnci Ölçümü -1 adlı yazıya buradan ulaşabilirsiniz.